宾夕法尼亚大学和密歇根大学的工程师团队刚刚打破了微型机器人领域的一个根本性限制。他们在《科学机器人》期刊发表的最新研究中,展示了一种宽度仅210至270微米、能够独立感知环境、做出判断并执行行动的全自主机器人。这个比沙粒还小的装置,集成了处理器、传感器、驱动器和供电系统,无需外部磁场或激光器的持续控制,就能在陌生环境中自主完成任务。
这项突破的意义不仅在于尺寸的缩小,更在于彻底改变了微型机器人的运作模式。传统的微型机器人虽然体积微小,但本质上是"遥控玩具",每一个动作都需要庞大的外部设备来指挥。而新型机器人则像是一个拥有完整神经系统的独立生命体,能够根据实时感知到的信息自主调整行为策略。
从受控傀儡到独立个体
微型机器人研究已经持续了数十年,科学家们设想用它们执行体内药物递送、血管疏通、细胞监测等精密任务。然而这个领域一直面临一个悖论:要让机器人足够小以便在人体内穿行,就必须牺牲其计算能力和自主性;而要赋予它智能决策能力,就不得不依赖体积庞大的外部控制系统。
康奈尔大学此前曾开发出带有"电子大脑"的100至250微米机器人,可以通过内置的CMOS电路生成步态控制信号。但这些机器人仍然需要外部光源持续供电,且功能相对单一。瑞士研究团队虽然成功让微型机器人在猪和羊的血管中导航,但依然离不开临床级电磁导航系统的外部引导。磁控式小型化医疗机器人领域的进展也表明,外部磁场控制仍是当前主流方案,这限制了机器人的应用场景和可扩展性。
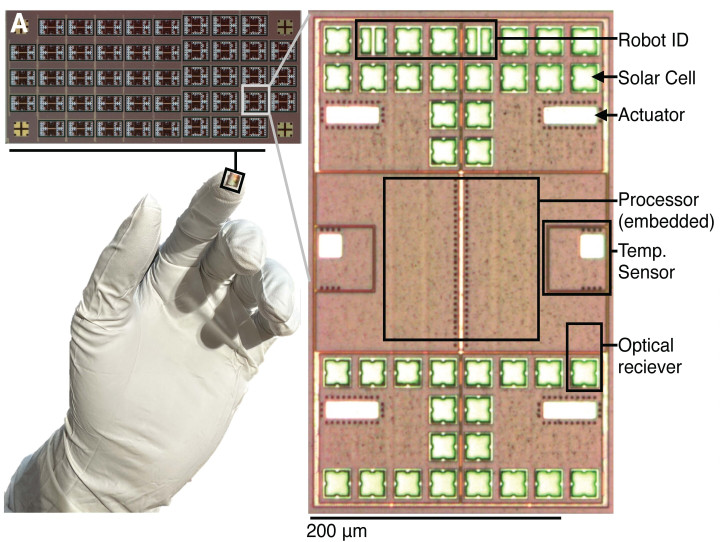
微型机器人电路概览。(A) 一块毫米级芯片,包含约 100 个微型机器人,放置在戴着手套的指尖上。每个微型机器人包含多个集成的微电子元件,涵盖传感、存储、处理、通信和供电等功能(比例尺:200 μm)。这些器件采用 55 nm CMOS 工艺在商业代工厂制造,并针对尺寸和功耗进行了优化。图片来源:Maya M. Lassiter
宾夕法尼亚大学助理教授马克·米斯金领导的团队意识到,真正的突破必须将计算能力植入机器人本身。他们采用了制造计算机芯片的55纳米CMOS工艺,这种互补金属氧化物半导体技术已经在商业代工厂中高度成熟。通过这种方法,研究人员能够像"打印"集成电路那样,在单个硅片上同时制造出上百个完整的微型机器人,每个都包含感知、存储、处理、通信和供电等多个系统。
这种制造方式带来了双重优势。首先是成本的大幅下降——利用现有的半导体产业基础设施,无需开发全新的生产线。其次是功能的高度集成——机器人身上的光伏电池能够捕获外部LED光线供电,温度传感器可以实时监测环境变化,处理器则根据预设程序和实时数据做出决策,驱动器负责执行运动指令。整个系统的功耗仅为纳瓦级别,相当于普通LED灯泡功耗的数百万分之一。
在温度梯度中的智能表现
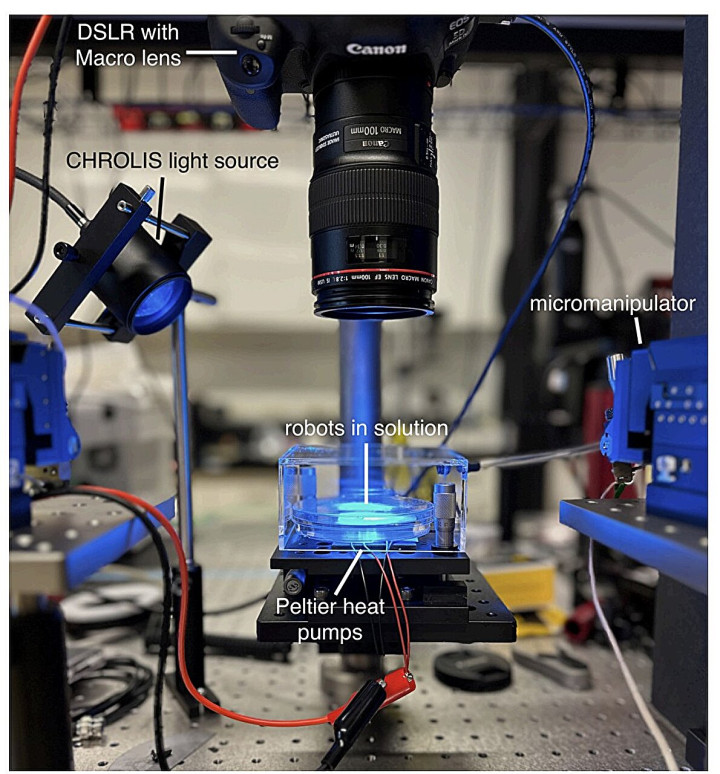
图示为用于温趋性实验中更大视场成像的微距单反相机设置。CHROLIS 光源提供光功率和通信功能,并通过可重新编程的图形用户界面进行控制。图片来源:Maya M. Lassiter
为了验证这种微型机器人是否真的能够"思考",研究团队设计了一个看似简单但极具挑战性的测试。他们将机器人放置在一个充满液体的培养皿中,通过帕尔帖泵在底部制造温度梯度,让容器的一端保持低温,另一端则相对温暖。外部LED持续照射为机器人供电,但不提供任何导航指令。
机器人被编程为追逐温暖区域。当温度传感器检测到环境正在变冷时,它会执行弧形运动来搜索更温暖的液体;而当温度上升时,它会原地转圈以保持在温暖位置。这种行为策略完全由机器人内部的处理器根据传感器反馈自主决定,无需任何外部干预。
在总共56次试验中,机器人成功地根据温度变化自主切换运动模式,展现出令人信服的决策能力。虽然从外部看来,这只是一个微小物体在液体中缓慢移动,但其背后蕴含的技术突破却是革命性的——这是首次实现真正意义上的亚毫米级自主机器人系统。
值得注意的是,这种机器人的投射阴影甚至比本体更明显,在加速200倍的视频中,可以清楚地看到它如何交替执行弧形运动和转向动作,沿着温度梯度爬升。这种视觉效果生动地展示了机器人如何将感知、决策和行动整合为流畅的自主行为。
通用平台的广阔前景
研究团队特别强调了这种设计的"通用性"优势。由于采用数字编程和机载计算,同一个物理平台可以通过软件重新配置来执行不同任务,而无需重新制造硬件。这意味着未来的微型机器人可以像智能手机一样,通过更新程序来获得新功能。
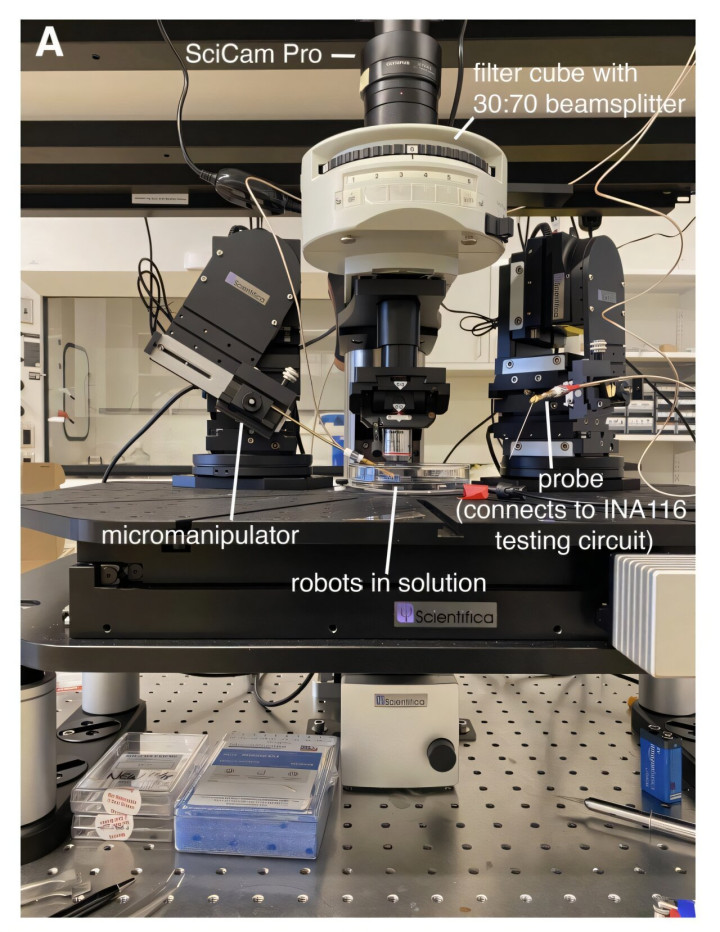
显微镜装置的注释图像。A:显微镜正面,显示溶液中的机器人,其探针连接到低输入偏置测试电路,并固定在微操纵器上。机器人通过 4 倍显微镜物镜观察,并使用 SciCam Pro 相机成像。B:显微镜装置背面,显示 CHROLIS 光源、可通过图形用户界面进行外部控制的扩展盒以及连接到显微镜的液体光导。图片来源:Maya M. Lassiter
从医疗角度看,这种机器人有望在靶向药物递送、血栓清除、组织修复等领域发挥作用。它们可以被释放到血液中,自主导航到病变部位,根据局部生理指标决定何时释放药物。在环境监测领域,大量微型机器人可以分散到水体或土壤中,实时检测污染物浓度并绘制污染分布图。制造业则可能利用它们进行微观尺度的装配和质量检测。
研究论文指出:"将计算能力转移到微型机器人本身,我们将成本和操作开销降至最低,为广泛应用铺平了道路。"这种去中心化的控制模式不仅降低了系统复杂度,还提高了可扩展性——数百个机器人可以同时工作,而不会因为共享一个外部控制器而相互干扰。
当然,距离这些微型机器人在人体内执行任务还有相当长的路要走。当前版本仍然依赖外部光源供电,这在体内环境中显然不现实。研究团队的下一个目标是开发完全集成的无线运动系统,可能采用化学能、超声波或射频能量作为动力来源。此外,如何在复杂的三维生理环境中精确定位和追踪这些微小装置,也是亟待解决的挑战。
但技术的方向已经明确:未来的微型机器人将不再是被动的工具,而是能够自主感知、判断和行动的智能个体。当数百万这样的"思考者"协同工作时,它们或许能够完成今天看来不可思议的任务。
配资公司官网网站提示:文章来自网络,不代表本站观点。